Спутниковая система навигации — это… Что такое Спутниковая система навигации?
 «Navstar-GPS», спутник второго поколения
«Navstar-GPS», спутник второго поколения  | В этой статье не хватает ссылок на источники информации. Информация должна быть проверяема, иначе она может быть поставлена под сомнение и удалена. Вы можете отредактировать эту статью, добавив ссылки на авторитетные источники. Эта отметка установлена 14 мая 2011. |
Спутниковая система навигации — комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты) и времени, а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов.
Основные элементы
Основные элементы спутниковой системы навигации:
- Орбитальная группировка, состоящая из нескольких (от 2 до 30) спутников, излучающих специальные радиосигналы;
- Наземная система управления и контроля (наземный сегмент), включающая блоки измерения текущего положения спутников и передачи на них полученной информации для корректировки информации об орбитах;
- Приёмное клиентское оборудование («спутниковые навигаторы»), используемое для определения координат;
- Опционально: наземная система радиомаяков, позволяющая значительно повысить точность определения координат.
- Опционально: информационная радиосистема для передачи пользователям поправок, позволяющих значительно повысить точность определения координат.
Принцип работы
Принцип работы спутниковых систем навигации основан на измерении расстояния от антенны на объекте (координаты которого необходимо получить) до спутников, положение которых известно с большой точностью. Таблица положений всех спутников называется альманахом, которым должен располагать любой спутниковый приёмник до начала измерений. Обычно приёмник сохраняет альманах в памяти со времени последнего выключения и если он не устарел — мгновенно использует его. Каждый спутник передаёт в своём сигнале весь альманах. Таким образом, зная расстояния до нескольких спутников системы, с помощью обычных геометрических построений, на основе альманаха, можно вычислить положение объекта в пространстве.
Метод измерения расстояния от спутника до антенны приёмника основан на определённости скорости распространения радиоволн. Для осуществления возможности измерения времени распространяемого радиосигнала каждый спутник навигационной системы излучает сигналы точного времени, используя точно синхронизированные с системным временем атомные часы. При работе спутникового приёмника его часы синхронизируются с системным временем, и при дальнейшем приёме сигналов вычисляется задержка между временем излучения, содержащимся в самом сигнале, и временем приёма сигнала. Располагая этой информацией, навигационный приёмник вычисляет координаты антенны. Все остальные параметры движения (скорость, курс, пройденное расстояние) вычисляются на основе измерения времени, которое объект затратил на перемещение между двумя или более точками с определёнными координатами.
В реальности работа системы происходит значительно сложнее. Ниже перечислены некоторые проблемы, требующие специальных технических приёмов по их решению:
- Отсутствие атомных часов в большинстве навигационных приёмников. Этот недостаток обычно устраняется требованием получения информации не менее чем с трёх (2-мерная навигация при известной высоте) или четырёх (3-мерная навигация) спутников; (При наличии сигнала хотя бы с одного спутника можно определить текущее время с хорошей точностью).
- Неоднородность гравитационного поля Земли, влияющая на орбиты спутников;
- Неоднородность атмосферы, из-за которой скорость и направление распространения радиоволн может меняться в некоторых пределах;
- Отражения сигналов от наземных объектов, что особенно заметно в городе;
- Невозможность разместить на спутниках передатчики большой мощности, из-за чего приём их сигналов возможен только в прямой видимости на открытом воздухе.
Применение систем навигации
Кроме навигации, координаты, получаемые благодаря спутниковым системам, используются в следующих отраслях:
- Геодезия: с помощью систем навигации определяются точные координаты точек
- Картография: системы навигации используется в гражданской и военной картографии
- Навигация: с применением систем навигации осуществляется как морская, так и дорожная навигация
- Спутниковый мониторинг транспорта: с помощью систем навигации ведётся мониторинг за положением, скоростью автомобилей, контроль за их движением
- Сотовая связь: первые мобильные телефоны с GPS появились в 90-х годах. В некоторых странах (например, США) это используется для оперативного определения местонахождения человека, звонящего 911. В России в 2010 году начата реализация аналогичного проекта — Эра-ГЛОНАСС.
- Тектоника, Тектоника плит: с помощью систем навигации ведутся наблюдения движений и колебаний плит
- Активный отдых: существуют различные игры, где применяются системы навигации, например, Геокэшинг и др.
- Геотегинг: информация, например фотографии «привязываются» к координатам благодаря встроенным или внешним GPS-приёмникам
Современное состояние
В настоящее время работают или готовятся к развёртыванию следующие системы спутниковой навигации:
GPS
Принадлежит министерству обороны США. Этот факт, по мнению некоторых государств, является её главным недостатком. Устройства поддерживающие навигацию по GPS являются самыми распространёнными в мире. Также известна под более ранним названием NAVSTAR.
ГЛОНАСС
Принадлежит министерству обороны России. Система, по заявлениям разработчиков наземного оборудования, будет обладать некоторыми техническими преимуществами по сравнению с GPS. После 1996 года спутниковая группировка сокращалась и к 2002 году практически полностью пришла в упадок. Была полностью восстановлена только в конце 2011 года. Отмечается малая распространенность клиентского оборудования. К 2025 году предполагается глубокая модернизация системы.
Бэйдоу
Развёртываемая Китаем подсистема GNSS предназначена для использования только в этой стране. Особенность — небольшое количество спутников, находящихся на геостационарной орбите. В настоящий момент выведено на орбиту Земли восемь навигационных спутников. Согласно планам, к 2012 году она сможет покрывать Азиатско-Тихоокеанский регион, а к 2020 году, когда количество спутников будет увеличено до 35, система «Бэйдоу» сможет работать как глобальная. Реализация данной программы началась в 2000 году. Первый спутник вышел на орбиту в 2007-ом.
Galileo
Европейская система, находящаяся на этапе создания спутниковой группировки. Планируется полностью развернуть спутниковую группировку к 2020 году.
IRNSS
Индийская навигационная спутниковая система, в состоянии разработки. Предполагается для использования только в этой стране. Первый спутник был запущен в 2008 году.
QZSS
Первоначально японская QZSS была задумана в 2002 г. как коммерческая система с набором услуг для подвижной связи, вещания и широкого использования для навигации в Японии и соседних районах Юго-Восточной Азии. Первый запуск спутника для QZSS был запланирован на 2008 г. В марте 2006 японское правительство объявило, что первый спутник не будет предназначен для коммерческого использования и будет запущен целиком на бюджетные средства для отработки принятых решений в интересах обеспечения решения навигационных задач. Только после удачного завершения испытаний первого спутника начнётся второй этап и следующие спутники будут в полной мере обеспечивать запланированный ранее объём услуг.
Основные характеристики систем навигационных спутников
| параметр, способ | СРНС ГЛОНАСС | GPS NAVSTAR | TEN GALILEO |
|---|---|---|---|
| Число НС (резерв) | 24 (3) | 24 (3) | 27 (3) |
| Число орбитальных плоскостей | 3 | 6 | 3 |
| Число НС в орбитальной плоскости | 8 | 4 | 9 |
| Тип орбит | Круговая (e=0±0.01) | Круговая | Круговая |
| Высота орбиты, КМ | 19100 | 20183 | 23224 |
| Наклонение орбиты, градусы | 64.8±0.3 | ~55 (63) | 56 |
| Номинальный период обращения по среднему солнечному времени | 11ч 15мин 44±5с | ~11ч 58 мин | 14 ч 4 мин. и 42 с. |
| Способ разделения сигналов НС | Частотный | Кодовый | Кодово-частотный |
| Несущие частоты радиосигналов, МГц | L1=1602.5625…1615.5 L2=1246.4375…1256.5 | L1=1575.42 L2=1227.60 L5=1176.45 | E1=1575.42 E5=1191.795 E5A=1176.46 E5B=1207.14 E6=12787.75 |
| период повторения дальномерного кода (или его сегмента) | 1 мс | 1 мс (С/А-код) | нет данных |
| тип дальномерного кода | М-последовательность (СТ-код 511 зн.) | Код Голда (С/А-код 1023 зн.) | М-последовательность |
| тактовая частота дальномерного кода, МГц | 0.511 | 1.023 (С/А-код) 10.23 (P,Y-код) | Е1=1.023 E5=10.23 E6=5.115 |
| Скорость передачи цифровой информации(соответственно СИ- и D- код) | 50 зн/с (50Гц) | 50 зн/с (50Гц) | 25, 50, 125, 500, 100ГЦ |
| Длительность суперкадра, Мин | 2,5 | 12,5 | 5 |
| Число кадров в суперкадре | 5 | 25 | нет данных |
| Число строк в кадре | 15 | 5 | нет данных |
| Система отсчета времени | UTS (SU) | UTS (USNO) | UTS (GST) |
| Система отсчета координат | ПЗ-90/ПЗ90.2 | WGS-84 | ETRF-00 |
| Тип эфемирид | Геоцентрические координаты и их производные | Модифицированные кеплеровы элементы | Модифицированные кеплеровы элементы |
| Сектор излучения от направления на центр земли | ±19 в 0 | L1=±21 в 0 L2=±23.5 в 0 | нет данных |
| Сектор Земли | ±14.1 в 0 | ±13.5 в 0 | нет данных |
Технические детали работы систем
Рассмотрим некоторые особенности основных действующих систем спутниковой навигации (GPS и ГЛОНАСС):
- Обе системы имеют двойное назначение — военное и гражданское, поэтому излучают два вида сигналов: один с пониженной точностью определения координат (~100 м) для гражданского применения и другой высокой точности (~10-15 м и точнее) для военного применения. Для ограничения доступа к точной навигационной информации вводят специальные помехи, которые могут быть учтены после получения ключей от соответствующего военного ведомства (США для GPS и России для ГЛОНАСС). В настоящее время эти помехи отменены, и точный сигнал доступен гражданским приёмникам, однако в случае соответствующего решения государственных органов стран-владельцев военный код может быть снова заблокирован (в системе GPS это ограничение было отменено только в мае 2000 года и в любой момент может быть восстановлено).
- Спутники GPS располагаются в шести плоскостях на высоте примерно 20 180 км. Спутники ГЛОНАСС (шифр «Ураган») находятся в трёх плоскостях на высоте примерно 19 100 км. Номинальное количество спутников в обеих системах — 24. Группировка GPS полностью укомплектована в апреле 1994-го и с тех пор поддерживается, группировка ГЛОНАСС была полностью развёрнута в декабре 1995-го, но с тех пор значительно деградировала. В 2011 году система ГЛОНАСС полностью восстановлена, количество спутников в группировке достигла 24 .В системе появился орбитальный резерв.
- Обе системы используют сигналы на основе т. н. «псевдошумовых последовательностей», применение которых придаёт им высокую помехозащищённость и надёжность при невысокой мощности излучения передатчиков.
- В соответствии с назначением, в каждой системе есть две базовые частоты — L1 (стандартной точности) и L2 (высокой точности). Для GPS L1=1575,42 МГц и L2=1227,6 МГц. В ГЛОНАСС используется частотное разделение сигналов, то есть каждый спутник работает на своей частоте и, соответственно, L1 находится в пределах от 1602,56 до 1615,5 МГц и L2 от 1246,43 до 1256,53.
- Каждый спутник системы, помимо основной информации, передаёт также вспомогательную, необходимую для непрерывной работы приёмного оборудования. В эту категорию входит полный альманах всей спутниковой группировки, передаваемый последовательно в течение нескольких минут. Таким образом, старт приёмного устройства может быть достаточно быстрым, если он содержит актуальный альманах (порядка 1-й минуты) — это называется «тёплый старт», но может занять и до 15-ти минут, если приёмник вынужден получать полный альманах — т. н. «холодный старт». Необходимость в «холодном старте» возникает обычно при первом включении приёмника, либо если он долго не использовался.
- Для подавления сигналов спутниковых навигационных систем используются передатчики активных помех. Впервые широкой общественности передатчики разработки российской компании «Авиаконверсия» были представлены в 1997 году на авиасалоне МАКС-1997.[1]
Дифференциальное измерение
Отдельные модели спутниковых приёмников позволяют производить т. н. «дифференциальное измерение» расстояний между двумя точками с большой точностью (сантиметры). Для этого измеряется положение навигатора в двух точках с небольшим промежутком времени. При этом, хотя каждое такое измерение имеет точность порядка 10-15 метров без наземной системы корректировки и 10-50 см с такой системой, измеренное расстояние имеет погрешность намного меньшую, так как факторы, мешающие измерению (погрешность орбит спутников, неоднородность атмосферы в данном месте Земли и т. д.) в этом случае взаимно вычитаются. Кроме того, есть несколько систем, которые посылают уточняющую информацию («дифференциальную поправку к координатам»), позволяющую повысить точность измерения координат приёмника до десяти сантиметров. Дифференциальная поправка пересылается либо с геостационарных спутников, либо с наземных базовых станций, может быть платной (расшифровка сигнала возможна только одним определённым приёмником после оплаты «подписки на услугу») или бесплатной.
В настоящее время (2009 год) существуют бесплатные американская система WAAS, европейская система EGNOS, японская система MSAS основанные на нескольких передающих коррекции геостационарных спутниках, позволяющих получить высокую точность (до 30 см).
Запланировано создание системы коррекции для ГЛОНАСС под названием СДКМ.
См. также
Примечания
Ссылки
Международный форум по спутниковой навигации Мероприятие, посвящённое вопросам спутниковой навигации
Мобильный ГИС для предприятий лесного хозяйства GPS навигация, контроль лесоустроительных данных по спутниковым снимкам, карта лесхоза, таксационное описание в мобильном телефоне.
dic.academic.ru
Список навигационных систем — это… Что такое Список навигационных систем?
Список навигационных систем и компонентов (аппаратных и программных) для их построения в целях навигации: пешей, а также наземного, речного и морского, авиационного и космического транспорта.
Наземная навигация
Готовые продукты (программно-аппаратные комплексы)
- Shturmann — российский продукт для автонавигации.
- Garmin — американский продукт для автонавигации.
- TomTom — голландский продукт для автонавигации.
- Navigon — Navigon — немецкий продукт для автонавигации.
Программное обеспечение
Бесплатные продукты с открытым исходным кодом
Бесплатные проприетарные продукты
- Google Maps — один из наиболее популярных в мире продуктов для пешей навигации и навигации наземного транспорта.
- OpenStreetMap — картографический интернет-проект карты всего мира.
- Семь дорог — один из популярных продуктов, используемых для автонавигации, разработка компании Navikey
Платные продукты
- TomTom — один из популярных продуктов, используемых для автонавигации.
- iGO — один из популярных продуктов, используемых для автонавигации.
- MapSource — один из популярных продуктов, используемых для навигации.
- DON’T PANIC (программа) — один из популярных продуктов, используемых для автонавигации.
- Навител Навигатор — один из популярных продуктов, используемых для автонавигации, разработка ЗАО «ЦНТ».
- Автоспутник — один из популярных продуктов, используемых для автонавигации, разработка ООО «Навигационные системы»
- СитиГид- один из популярных продуктов, используемых для автонавигации, разработка ООО «МИТ»
Картографическое обеспечение
- Navteq — один из наиболее популярных в мире картографических ресурсов для целей наземной навигации.
Аппаратное обеспечение
Системы речной и морской навигации
Аэронавигационные системы
- АвиаКомИнфо — российская система отображения аэронавигационных карт для всех эшелонов и правил полётов и решения навигационных задач. Регулярное обновление картматериала в цифровом виде.
Системы космической навигации
- «Вымпел» — закрытая навигационная система для советских космических кораблей семейства «Буран». Обеспечивает измерение навигационных параметров координат орбитального корабля для коррекции его положения в полёте (ниже 40 км), автоматического полета по глиссаде, приземления и пробега по посадочной полосе. (В реальном полёте при полном автоматическом управлении спуском с орбиты Земли и посадкой (в условиях запредельного бокового ветра, что выходило за расчётные рамки) обеспечила отклонение от осевой линии ВПП на расстояние около полуметра.)
Примечания
dic.academic.ru
какие бывают системы, параметры и функции / Promwad corporate blog / Habr
В этой статье мы расскажем про глобальные системы позиционирования, разработанные в США, России, ЕС и Китае; объясним, как поддержка технологий глобальной спутниковой навигации реализована в электронных устройствах, а также опишем ключевые и дополнительные функции современных навигационных приемников.
GPS
Система GPS (Global Positioning System) создавалась для применения в военных целях. Она начала работать в конце 80-х — начале 90-х годов, однако до 2000 года искусственные ограничения на определение местоположения существенно сдерживали ее возможности использования в гражданских целях.
После отмены ограничений на точность определения координат ошибка снизилась со 100 до 20 м (в последних поколениях GPS-приёмников при идеальных условиях ошибка не превышает 2 м). Такие условия позволили использовать систему для широкого круга общих и специальных задач:
- Определение точного местоположения
- Навигация, движение по маршруту с привязкой к карте на основании реального местоположения
- Синхронизация времени
Орбиты спутников системы GPS. Пример видимости спутников из одной из точек на поверхности Земли. Visible sat — это число спутников, видимых над горизонтом наблюдателя в идеальных условиях (чистое поле).
ГЛОНАСС
Российский аналог GPS — ГЛОНАСС (глобальная навигационная спутниковая система) — была развёрнута в 1995 году, но в связи с недостаточным финансированием и малым сроком службы спутников она не получила широкого распространения. Вторым рождением системы можно считать 2001 год, когда была принята целевая программа ее развития, благодаря которой ГЛОНАСС возобновил полноценную работу в 2010 году.
Сегодня на орбите работают 24 спутника ГЛОНАСС, они охватывают навигационным сигналом весь земной шар.
Новейшие потребительские устройства используют GPS и ГЛОНАСС как взаимодополняющие системы, подключаясь к ближайшим найденным спутникам, это значительно увеличивает скорость и точность их работы.
Пример: aвтомобильное GPS/ГЛОНАСС-навигационно-связное устройство на базе ОС Android, разработанное командой Promwad по заказу российского конструкторского бюро. Реализована поддержка GSM/GPRS/3G. Устройство автоматически обновляет информацию о дорожной обстановке в режиме реального времени и предлагает водителю оптимальный маршрут с учётом загруженности дорог.
Сейчас на стадии разработки находятся еще две спутниковые системы: европейская Galileo и китайская Compass.
Galileo
Галилео — совместный проект Европейского союза и Европейского космического агентства, анонсированный в 2002 году. Изначально рассчитывали, что уже в 2010 году в рамках этой системы на средней околоземной орбите будут работать 30 спутников. Но этот план не был реализован. Сейчас предположительной датой начала эксплуатации Galileo считается 2014 год. Однако ожидается, что полнофункциональное использование системы начнется не ранее 2020 года.
Compass
Это следующая ступень развития китайской региональной навигационной системы Beidou, которая была введена в эксплуатацию после запуска 10 спутников в конце 2011 года. Сейчас она обеспечивает покрытие в границах Азии и Тихоокеанского региона, но, как ожидается, к 2020 году система станет глобальной.
Сравнение орбит спутниковых навигационных систем GPS, ГЛОНАСС, Galileo и Compass (средняя околоземная орбита — MEO) с орбитами Международной космической станции (МКС), телескопа Хаббл и серии спутников Иридиум (Iridium) на низкой орбите, а также геостационарной орбиты и номинального размера Земли.
Поддержка ГНСС
Поддержка технологи глобальных навигационных спутниковых систем (ГНСС) в электронных устройствах реализуется на базе навигационных приемников, которые могут быть выполнены в различных вариантах:
- Smart Antenna — модуль, состоящий из керамической антенны и навигационного приемника. Преимущества: компактность, не требует согласования, удешевляет разработку за счет сокращения сроков.
- MCM (Multi Chip Module) — чип, включающий все компоненты навигационного приемника.
- OEM — экранированная плата, включающая ВЧ интерфейсный процессор и процессор частот основной полосы (RF-frontend + baseband), SAW-фильтры и обвязку. Это наиболее популярное решение на данный момент.
Навигационный модуль подключается к микроконтроллеру или системе на кристалле по интерфейсу UART/RS-232 или USB.
Ключевые параметры навигационных приемников
Прежде чем навигационный приемник сможет выдавать информацию о местоположении, он должен обладать тремя наборами данных:
- Сигналы от спутников
- Альманах — информация о приблизительных параметрах орбит всех спутников, а также данные для калибровки часов и характеристики ионосферы
- Эфемериды — точные параметров орбит и часов каждого спутника
Характеристика TTFF показывает сколько времени требуется приемнику на поиск сигналов от спутников и определение местоположения. Если приёмник новый, или был выключен на протяжении длительного периода, или был перевезен на большое расстояние с момента последнего включения, время до получения набора необходимых данных и определения места увеличивается.
Производители приемников используют различные методы уменьшения TTFF, включая скачивание и сохранения альманаха и эфемерид по беспроводным сетям передачи данных (т.н. метод Assisted GPS или A-GPS), это быстрее чем извлечение этих данных из сигналов ГНСС.
Холодный старт описывает ситуацию, когда приемнику нужно получение всей информации для определения места. Это может занять до 12 минут.
Теплый старт описывает ситуацию, когда у приемника есть почти вся необходимая информация в памяти, и он определит место в течении минуты.
Одним из ключевых параметров навигационных модулей в мобильных устройствах является энергопотребление. В зависимости от режима работы модуль потребляет различное количество энергии. Фаза поиска спутников (TTFF) характеризуется большим, а слежение меньшим энергопотреблением. Также производители реализуют различные схемы уменьшения энергопотребления, например, путем периодического перевода модуля в режим сна.
Как правило, все модули выдают данные по текстовому протоколу NMEA-0183, но кроме указанного текстового протокола каждый производитель имеет свой собственный двоичный протокол (Binary), который позволяет изменять конфигурацию модуля под конкретное использование либо получать доступ к дополнительному функционалу, а также доступ к сырым измерениям. Двоичный протокол удобен для использования на микроконтроллерах, т.к. при этом нет необходимости выполнять преобразование из текста в двоичные данные, тем самым экономя программную память путем исключения библиотеки работы со строками и времени на преобразование.
Стандарт NMEA-2000 — это развитие протокола NMEA-0183. В качестве физического уровня в NMEA-2000 используется CAN-шина, которая была выбрана в виду большей защищенности по сравнению с RS-232. С точки зрения протокола передачи данныхNMEA-2000 существенно отличается от своего предшественника, т.к. использует двоичный протокол, базирующийся на стандарте SAE J1939.
Частота обновления данных о местоположении и скорости всех модулей составляет 1 Гц, но при необходимости ее можно поднять до 5 или 10 Гц.
В зависимости от области применения модуль можно сконфигурировать под определенные динамические характеристики, которые он должен отслеживать (например, максимальное ускорение объекта). Это позволяет использовать оптимальный алгоритм и улучшать качество измерений.
Для выполнения навигационной задачи модуль должен одновременно принимать сигналы от нескольких спутников, т.е. иметь несколько приемных каналов. На сегодняшний день это число лежит в диапазоне от 12 до 88.
Точность определения местоположения по GPS составляет в среднем 15 м, она обусловлена используемым неточным сигналом, влиянием атмосферы на распространение радиосигнала, качеством кварцевых генераторов в приемниках и пр. Но с помощью корректирующих методов возможно улучшить точность определения местоположения. Эта технология называется Differential GPS. Существует два метода коррекции: наземный и спутниковый DGPS.
В наземных методах коррекции наземные станции дифференциальных поправок постоянно сверяют свое заведомо известное местоположение и сигналы от навигационных спутников. На базе этой информации вычисляются корректирующие величины, которые могут быть переданы с помощью УКВ- или ДВ-передатчика на мобильные DGPS-приемники в формате RTCM. На основании полученной информации потребитель может корректировать процесс определения собственного местоположения. Точность этого метода составляет 1—3 метра и зависит от расстояния до передатчика корректирующей информации и качества сигнала.
Спутниковые методы, такие как система WAAS (Wide Area Augmentation System), доступная в Северной Америке, и система EGNOS (European Geostationary Navigation Overlay System), доступная в Европе, шлют корректирующие данные с геостационарных спутников, таким образом достигается большая область приема, чем при наземных методах.
Спутниковые системы дифференциальной коррекции (SBAS — Space Based Augmentation Systems) позволяют улучшить точность, надежность и доступность навигационной системы за счет интеграции внешних данных в процессе расчета
Демонстрация принципа работы системы WAAS (Wide Area Augmentation System) на территории США
Одним из основных параметров, влияющих на точность определения местоположения и стабильность приема является чувствительность. Она, как правило, определяется качеством малошумящего усилителя на входе приемника и сложностью реализованных алгоритмов цифровой обработки. Типовые значения современных приемников лежат в диапазоне 143 дБм для поиска и 160 дБм для слежения.
Кроме определения местоположения ГНСС предоставляют информацию о точном времени. Как правило, все приемники имеют выход PPS (pulse per second, импульсов в секунду) — секундная метка (1 Гц), которая точно синхронизирована с временной шкалой UTC.
Дополнительные функции навигационных устройств
Счисление пути. На основе информации о направлении движения и пройденном пути (предоставляется дополнительными датчиками) приемник может рассчитывать свои координаты при отсутствии сигналов от спутников (например, в туннелях, на подземных стоянках и в плотной городской застройке).
Некоторые модули имеют возможность напрямую подключать флэш-память (например, по SPI) к модулю для записи трека c необходимой периодичностью. Эта функция позволяет отказаться от использования отдельного микроконтроллера, либо она может быть полезной для минимизации энергопотребления (т.е. система на кристалле может находиться в состоянии сна).
На этом поверхностный обзор технологий глобальной спутниковой навигации завершен. Спасибо за внимание. Примеры реализованных проектов на базе этих ГЛОНАСС и GPS можно посмотреть на странице разработок компании Promwad.
habr.com
Навигационные системы автомобиля (GPS)
Общие сведения
Система навигации рассчитывает правильный путь к выбранной цели и ведет автомобиль посредством соответствующих рекомендаций относительно направления движения.
Для реализации этой задачи еще в конце 70-х годов были начаты поиски решений. Но только в середине 90-х годов на рынке появились первые пригодные для использования, системы навигации, чьи рекомендации по движению были четкими, надежными и поддерживались хорошей картографией. Количество систем навигации с тех пор заметно возросло. При этом их ассортимент включает как простые приборы, которые объединяют в себе радиофункции и навигацию по стрелке в одном корпусе, так и системы, которые полностью встроены в функции автомобиля и наряду с указаниями относительно направления движения, предлагают детальную картографию и обширную дополнительную информацию, различные функции телематики, например, передачу координат местоположения при автоматическом экстренном вызове, или могут управляться посредством голосовых команд.

Определение местоположения и расчет маршрута
Основным условием для расчета маршрута движения и ведения к цели, прежде всего, является определение собственного местоположения. Это осуществляется посредством глобальной системы позиционирования (GPS = Global Positioning System). При этом речь идет о 24 спутниках, которые на расстоянии прибл. 20200 км от Земли вращаются вокруг нее по шести орбитам. Орбиты расположены относительно друг друга под углом 60 градусов (6 х 60° = 360°).

Рисунок. Орбиты GPS-спутников
На каждой орбите расположено по 4 спутника с одинаковым расстоянием друг от друга. Все спутники вращаются по своим орбитам под углом 55 градусов к экватору, и для полного оборота им требуется 12 часов. Благодаря шести различным орбитам и равномерному распределению всех спутников с любой обитаемой точки Земли обеспечивается видимость, по меньшей мере, 4 спутников. В большинстве случаев прием сигналов идет с большего количества спутников (максимум восьми). Все спутники через равные промежутки времени 50 раз в секунду на двух частотах передают сигналы идентификации, местоположения и времени. Для точного определения местоположения одновременно должны приниматься, по меньшей мере, 3 спутника. Определение местоположения основывается на разном времени распространения сигнала от отдельных спутников к приемнику. На основании этих сигналов может быть рассчитано местоположение. Вся система GPS основывается на точных сигналах времени и, тем самым, на точных часах.
Для использования в гражданских целях (системы GPS, которая первоначально использовалась только в военных целях) точность составляла сначала прибл. 100 м по горизонтальной оси, прибл. 150 м по вертикальной оси и прибл. 0,3 миллисекунды отклонения по времени. Сегодня (с 5/2000) и для применения в гражданских целях используются сигналы, которые обеспечивают точность ±10 м.
На основании данных о собственном местоположении и введенной водителем цели навигационный компьютер рассчитывает маршрут движения. При этом компьютер использует CD-ROM или все чаще DVD и жесткий диск, на котором в цифровой форме сохранены карты дорог и много дополнительной информации. Координаты местоположения преобразуются в положение на карте, а затем по векторам суммируются разные дороги, пока не будет достигнута необходимая цель поездки. Расчет выполняется за несколько секунд. После этого система может выдавать соответствующие рекомендации относительно направления движения для ведения до цели назначения.
Прием сигналов со спутников GP5 иногда может нарушаться в долинах, туннелях или из-за высоких зданий. Однако для обеспечения дальнейшей навигации система получает другие входные сигналы, такие как сигнал скорости/участка пути, а для изменения направления сигнал датчика угловой скорости рыскания автомобиля, который также называется гирометром, гироскопом или G-датчиком. При помощи таких сигналов и оцифрованных дорожных карт навигационный компьютер может продолжать определение местоположения и ведение до цели поездки. Это называется еще навигацией счислением пути или «dead reckoning» (dead reckoning = англ. приблизительный расчет, калькуляция). На основании этих входных сигналов с дорожными картами дополнительно сравниваются и корректируются возникающие неточности или незначительные отклонения от текущего местоположения.

Рисунок. Самонаведение по карте
Так называемое самонаведение по карте (Map-Matching: тар = англ. географическая карта; matching = англ. согласовывать, подгонять) наглядно представлено на рисунке а — с После первого грубого расчета местоположения системой GPS через несколько метров выполняется распознавание дороги, по которой в данное время движется автомобиль. При повороте, который фиксируется гирометром, может быть определено точное местоположение. На сегодняшний день благодаря постоянному взаимодействию и расчетам всех входных сигналов возможны точное определение местоположения и ведение по маршруту к цели назначения.
Компоненты и техника в автомобиле
Системам навигации требуется GPS-приемник, антенна, навигационный компьютер, панель управления и дисплей, гироскоп/датчик угловой скорости рыскания автомобиля, CD/DVD и сигнал скорости/участка пути. Зачастую в современных автомобилях встраивается ТМС-приемник (Traffic Message Channel = англ. канал передачи сообщений о маршрутах движения), в результате чего используемый в первых системах навигации датчик геомагнитного поля сегодня больше не нужен. Существуют различные варианты и комбинации отдельных упомянутых выше компонентов навигационной системы.
Основным элементом системы навигации является навигационный компьютер, который обрабатывает различные входные сигналы, рассчитывает соответствующий маршрут до пункта назначения, а затем выдает необходимые рекомендации относительно направления движения. В него всегда встроен GPS-приемник, который обрабатывает сигналы антенн.
Навигационный компьютер может быть выполнен в виде отдельного блока, в этом случае он размещается в багажнике или в области вещевого ящика в салоне.
Особенно в системах радионавигации со стрелочным представлением без карты маршрута навигационный компьютер, GPS-приемник и радио образуют один единый блок. Панель управления и индикации также встроена в такой блок, а сам блок находится в шахте для радио.
Однако уже существуют новые системы, в которых навигационный компьютер вместе с GPS-приемником, радио и головным блоком шинной системы MOST с межсетевым интерфейсом образуют единый блок, размещенный в средней консоли.
Панели индикации и правления при этом разделены. Это касается, в частности, автомобилей с информационно-развлекательными системами, которые наряду с графическими и голосовыми подсказками относительно направления движения предлагают подробную картографическую информацию. Для выполнения расчетов и возможности считывания электронных карт с CD-ROM, DVD или жесткого диска все навигационные приборы требуют наличия программного обеспечения. Программное обеспечение, в большинстве случаев отличается в зависимости от производителя и подлежит постоянной доработке/актуализации. На это следует обратить особое внимание в связи с использованием CD-ROM/DVD. CD-ROM/DVD должны подходить для автомобиля и соответствующего уровня программного обеспечения, в противном случае, работа навигационной системы обеспеченна не будет.
Ha CD-ROM или DVD сохранены все дорожные карты в электронном, цифровом виде. В первых навигационных системах на CD-ROM были записаны только автомагистрали, дороги федерального значения и основные соединительные дороги. На сегоднлшний день (по состоянию на 2005 г.) среднеевропейские страны Германия, Австрия, Швеция, Бельгия, Люксембург и Нидерланды оцифрованы на 100%, то есть на картах представлены все дороги. Все остальные европейские страны имеют еще незначительную степень оцифровывания, но с каждым годом доля оцифрованной информации увеличивается. По причине ограниченной емкости памяти на CD-ROM для разных стран и регионов существуют разные CD, которые необходимо менять в случае, если навигационная система используется в другой стране или регионе. Намного больший объем памяти DVD позволяет сохранить на одном DVD карты нескольких стран и регионов. DVD в качестве носителя инфор-
мации пришел на смену CD-ROM и в навигационных системах. В современных навигационных системах все данные сохранены на жестком диске. Наряду с сетью автомобильных дорог на CD- ROM и еще больше на DVD отображены и другие так называемые полезные объекты (Points of Interest) и особые цели. При этом речь может идти о заправках, стоянках, гостиницах и ресторанах, достопримечательностях и, например, о дилерах/сервисных центрах производителя. Поскольку сеть дорог и полезные объекты постоянно меняются, до 10% ежегодно, то CD-ROM/DVD постоянно теряет свою актуальность.
Другим важным компонентом навигационной системы для счисления пути наряду с CD-ROM/DVD является датчик угловой скорости рыскания автомобиля, также называемый датчиком угла поворота, гирометром или гироскоп. Датчик угловой скорости рыскания автомобиля регистрирует вращение автомобиля вокруг вертикальной оси при прохождении поворотов и предоставляет важный сигнал для постоянного самонаведения по карте. Датчик угловой скорости рыскания автомобиля всегда установлен в навигационном компьютере.

Рисунок. Пьезодатчик угловой скорости рыскания автомобиля
- а Отклонение при движении по прямой
- b Отклонение при движении на повороте
- Получающееся направление колебания камертона при движении на повороте
- Направление вращения автомобиля
- Получающееся направление колебания камертона при движении по прямой
- Сила Кориолиса
- Верхние пьезоэлементы (распознавание)
- Нижние пьезоэлементы (привод)
- Возбуждающее направление колебаний
Вторым важным входным сигналом для самонаведения по карте является сигнал скорости/участка пути. В современных системах почти всех производителей он передается через шинную систему к навигационному компьютеру в виде датаграммы. Для дооснащаемых радионавигационных приборов достаточным будет сигнал скорости, предоставляемый для радио.
Но чтобы, определить местоположение, требуются входные сигналы GPS-антенны. GPS-антенна должна иметь «визуальный контакт» с GPS-спутниками во избежание потерь при приеме из-за экранирования. Поэтому в большинстве случаев она находится на крыше автомобиля или крышке багажника. Однако возможными местами установки GPS-антенны могут быть также пространство между спинкой заднего сиденья и задним стеклом кузова или место для хранения на панели приборов.
GPS-антенна все чаще вместе с другими антеннами для радиоприема и телефона встраивается в комбинированные антенны.

Рисунок. Навигационная антенна для GPS-приема

Рисунок. Навигационная патч-антенна
- Сверхгибкий, защищенный от разрыва стержень
- Диплексер
- АМ-ЯМ-усилитель
- GPS-патч и усилитель
- Стандартный крепеж

Рисунок. Комбинированная антенна для GPS-, GSM- и радиоприема со встроенным активным антенным разветвителем
- Комбинированная антенна
- GPS-прием со спутников
- Мобильный GMS-телефон
- Авторадио с фантомным 12-В-питанием
Возможные функции
Условием навигации к намеченной цели после определения местоположения системой навигации является ввод цели водителем. Выполняется это, как правило, посредством функции пишущей машинки.
Для этого в меню навигации выбирается пункт «Ввод цели» и затем, в основном, посредством поворотно-нажимного переключателя вводится цель. Ввод посредством сенсорного дисплея (монитора) не используется. В большинстве систем с каждым вводом возможные цели ограничиваются. Условием ввода цели является возможность доступа системы навигации к соответствующему CD/DVD, на котором находится цель. Ввод цели может выполняться также посредством перекрестия на карте с изменяющимся масштабом.
Кроме того, ввод цели может выполняться посредством указания информации о пункте назначения, отдельных целей (POI), сохраненных адресов, возврата к исходному пункту назначения и т.д.
После ввода цели и подтверждения происходит расчет маршрута, который в зависимости от расстояния и мощности компьютера может длиться от нескольких секунд до одной минуты. Расчет маршрута происходит на основе выбранного водителем маршрута. Критерии маршрута для расчетов будут изменены только тогда, когда водитель сделает новый выбор маршрута.
После того, как маршрут до пункта назначения был рассчитан, выполняется сопровождение до цели с голосовыми подсказками, стрелками и, если предусмотрено, дополнительно при помощи отображения карт. При отображении карты можно изменять масштаб и направление карты (на север или по направлению движения). Маршрут показывается на карте и может быть вызван также из списка маршрутов.
Как правило, при активном сопровождении по маршруту также выдается информация об оставшемся участке пути до цели и ориентировочном времени прибытия. При отклонениях от рассчитанного участка пути выполняется новый расчет.
На основании сообщений о ситуации на дорогах может понадобиться новый расчет, если система навигации оснащена так называемым динамическим сопровождением по маршруту. Условием динамического сопровождения по маршруту является прием сообщений о ситуации на дорогах посредством FM-приемника с RDS-декодером или кодированной SMS-радиосвязью (радиослужба оповещения о ситуации на автомобильных дорогах) через телефон и, конечно, активация этой функции. В системе передачи данных по радио (RDS) наряду с именами радиостанций, альтернативными частотами передатчика и т.п. передаются ТМС-коды. При этом речь идет о стандартных сообщениях о ситуации на дорогах, которые передаются постоянно и по возможности актуально по цифровому каналу данных. Навигационная система постоянно оценивает сигналы ТМС или кодированные SMS и проверяет их влияние на рассчитанный маршрут движения. Если помехи движению касаются рассчитанного маршрута, то водитель информируется о месте возникновения помех, продолжительности и ориентировочном времени задержки.
В этом случае водитель может принять решение о расчете объездного маршрута и следовании по новому маршруту. Однако существуют навигационные системы, которые не оставляют выбора водителю и автоматически изменяют маршрут, выдают соответствующие указания по маршруту, если было выбрано динамическое сопровождение до цели. Динамическое сопровождение по маршруту обеспечивает, как правило, объезд дорожных пробок, поскольку информация о заторах учитывается заблаговременно, и расчет альтернативного маршрута может быть выполнен соответствующим образом. Таким образом, обеспечивается, что при объезде пробки вы не попадете в пробку на другом маршруте. При этом учет и актуализация данных о ситуации на дорогах в отдельных случаях является еще слабым местом системы динамического сопровождения по маршруту.
Объезды или альтернативные маршруты в некоторых навигационных системах могут быть введены самим водителем, когда знаешь, что на определенном участке пути ведется стройка или на определенном месте всегда возникает затор и т.п. Следующей функцией навигационной системы может быть отправка сообщения о текущем местоположении автомобиля в случае аварии. Для этого, однако, потребуется подключение навигационной системы к телефону и другим системам автомобиля.
Возможные сбои и их причины
В навигационных системах при поиске неисправностей в первую очередь следует считывать память ошибок и следовать предоставленным там указаниям. Существуют также некоторые мнимые неисправности, которые система не распознает как таковые.
В целом, задача навигационной системы заключается в сопровождении пользователя, не знакомого с данной местностью, до указанной цели, при этом система рассчитывает благоприятный маршрут на основании введенных критериев. Если человек, знающий местность, может указать более быстрый или короткий путь, чем рассчитывает навигационная система, то это не является ошибкой. Навигационная система может опираться только на имеющиеся программы, цифровой картографический материал и другие входные данные. Объезд уже отсутствующей дорожной пробки при динамическом сопровождении по маршруту также не является ошибкой навигационной системы.
Другие частые рекламации касаются функций CD/DVD. Как говорилось ранее, данные на CD/DVD теряют свою актуальность ежегодно прибл. на 10%. Это часто приводит к ошибкам в сопровождении по маршруту. Устаревший или поврежденный CD/DVD также может стать причиной сбоя системы, особенно если такие сбои появляются при вводе цели или изменении маршрута. Если при вставленном CD/DVD навигационная система требует установку CD/DVD, то причиной этого, чаще всего, является поврежденный CD/DVD. То же самое касается сообщений о том, что CD/DVD загрязнен, поцарапан или неправильно установлен, если он на самом деле установлен правильно. Несовместимые CD/DVD, в том числе с несоответствующей версией программного обеспечения, также могут вызывать уже упомянутые выше сообщения о неисправностях и ошибках. Устаревшие данные также могут привести к тому, что невозможно будет ввести цели, во время сопровождения по маршруту перед поворотами не будет указаний или сопровождение по маршруту будет неточным. Перед тем как использовать CD/DVD с новыми данными, при необходимости следует загрузить новое программное обеспечение на навигационный компьютер. Более детальную и точную информацию можно получить только в документации производителя.
Помехи при GPS-приеме или отсутствие GPS-приема вследствие постоянного самонаведения по карте проявляются не сразу. Только при отсутствии приема GPS-сигналов в течение длительного времени сопровождение по маршруту и особенно голосовые подсказки будут неточными. Невозможно будет запросить точное местоположение. Отсутствие GPS-сигналов опознается по тому, что надпись GPS или логотип GPS на дисплее не виден. Причиной кратковременного отсутствия GPS-приема могут быть экранирование из-за зданий, туннелей или атмосферных явлений и т.п. Помехи в GPS-приеме могут возникнуть также вследствие установленного дополнительного оборудования в зависимости от места установки GPS-антенны. Они могут быть вызваны, например, багажником на крыше при установке GPS-антенны на крыше или предметами между спинкой заднего сиденья и задним стеклом, если GPS-антенна установлена в этом месте. Разумеется, причина может крыться в неисправности GPS-антенны, порванных проводах, штекерных контактах и помехах при неблагоприятном размещении или проводке проводов.
Неточное сопровождение по маршруту с несовпадающими подсказками относительно направления движения могут быть также вызваны неверным сигналом участка пути. Причиной может быть использование неправильных размеров колес или ошибки программного обеспечения.
Если навигационная система полностью вышла из строя, причиной этому может быть неисправность навигационного компьютера. Перед заменой компьютера всегда следует проверить классические источники неисправностей, например, провода, штекеры, подачу напряжения и предохранители. После отсоединения навигационной системы от источника питания, например, после замены батареи или отсоединения аккумуляторной батареи автомобиля, потребуется несколько минут, пока система снова будет готова к работе.
Если автомобиль перевозили на длинное расстояние, то также потребуется несколько минут до приведения навигационной системы в состояние готовности. В экстремальных случаях может потребоваться прохождение длинного участка пути (макс, до 50 км), пока система сопровождения по маршруту полностью не восстановится.
В навигационных системах, которые являются частями интегрированных информационных систем для водителя, причиной сбоев могут быть также соседние системы. Поэтому при поиске неисправностей и считывании памяти ошибок также следует учитывать взаимосвязи систем.
Более старые навигационные системы, которые оснащены еще датчиком геомагнитного поля, чувствительны к статическим зарядам автомобиля, которые нарушают работу датчика. Накоплению статического заряда могут способствовать сильное солнечное излучение и неблагоприятные погодные условия, а также колеса с традиционной сегодня силикатной смесью. В этом случае автомобиль должен размагничиваться. Проще всего, однако, снять датчик геомагнитного поля и установить в навигационную систему новое программное обеспечение. Благодаря более точным GPS-сигналам, новым версиям программного обеспечения и использованию CD/DVD функция датчика больше не нужна.
ustroistvo-avtomobilya.ru
Навигационная система — это… Что такое Навигационная система?
- Навигационная система
- Навигационная система
-
сеть наземных радиостанций, подводная сеть гидроакустических станций, навигационных спутников с командно-измерительным комплексом, по излучаемым сигналам которых с помощью бортовых средств навигации обеспечивается определение координат кораблей самолетов и других подвижных объектов.
EdwART. Толковый Военно-морской Словарь, 2010
.
- Навигационная прокладка
- Навигационно-гидрографическое обеспечение
Смотреть что такое «Навигационная система» в других словарях:
Навигационная система — это совокупность приборов, алгоритмов и программного обеспечения, позволяющих произвести ориентирование объекта в пространстве (осуществить навигацию). Навигационные системы обеспечивают ориентацию с помощью: карт, имеющих видео, графический или… … Википедия
навигационная система большого радиуса действия — (одна из государственных радионавигационных систем США) [http://slovarionline.ru/anglo russkiy slovar neftegazovoy promyishlennosti/] Тематики нефтегазовая промышленность EN long range navigation … Справочник технического переводчика
навигационная система, использующая измерение времени и дальности — Предшественница GPS. — [http://www.iks media.ru/glossary/index.html?glossid=2400324] Тематики электросвязь, основные понятия EN navigation system using timing and ranging, precursor GPSNAVSTAR … Справочник технического переводчика
Навигационная система Navitron — Navitron международная система диспетчеризации и мониторинга транспортных средств, использующая ресурсы сетей сотовой связи (GSM) и глобальных навигационных спутниковых систем (GPS). На современном уровне решены вопросы прав доступа и… … Википедия
Судовая навигационная система — 5. Судовая навигационная система Е. Ship navigation system Судовые навигационные устройства, взаимоувязанные в единую упорядоченную структуру. Примечание. Система может быть автоматической без участия человека оператора, автоматизированной или… … Словарь-справочник терминов нормативно-технической документации
авиационная инерциальная навигационная система — инерциальная навигационная система Навигационная система, предназначенная как для определения координат местоположения самолета, так и для выработки сигналов управления, его движением по заданному маршруту. [ГОСТ 22837 77] Тематики пилотажно… … Справочник технического переводчика
бесплатформенная инерциальная навигационная система — бескарданная инерциальная навигационная система Инерциальная навигационная система, в которой акселерометры и гироскопические датчики устанавливаются на подвижном объекте без гироскопически стабилизированной платформы. [Сборник рекомендуемых… … Справочник технического переводчика
автоматизированная навигационная система для автомобильного и городского электрического транспорта — 3.2 автоматизированная навигационная система для автомобильного и городского электрического транспорта: Автоматизированная информационно телекоммуникационная система, предназначенная для обеспечения надежного централизованного диспетчерского… … Словарь-справочник терминов нормативно-технической документации
Авиационная инерциальная навигационная система — 19. Авиационная инерциальная навигационная система Инерциальная навигационная система Навигационная система, предназначенная как для определения координат местоположения самолета, так и для выработки сигналов управления его движением по заданному … Словарь-справочник терминов нормативно-технической документации
Прицельно-навигационная система — система, предназначенная для комплексного решения задач навигации и применения оружия. Решение двух задач в одной системе вызвано общностью математического аппарата, сложным взаимодействием алгоритмов и использованием одних и тех же датчиков… … Энциклопедия техники
dic.academic.ru
Принципы спутниковой навигации
Космический сегмент
Космический сегмент, состоящий из навигационных спутников, представляет собой совокупность источников радионавигационных сигналов, передающих одновременно значительный объем служебной информации. Основные функции каждого спутника — формирование и излучение радиосигналов, необходимых для навигационных определений потребителей и контроля бортовых систем спутника.
Наземный сегмент
В состав наземного сегмента входят космодром, командно-измерительный комплекс и центр управления. Космодром обеспечивает вывод спутников на требуемые орбиты при первоначальном развертывании навигационной системы, а также периодическое восполнение спутников по мере их выхода из строя или выработки ресурса. Главными объектами космодрома являются техническая позиция и стартовый комплекс. Техническая позиция обеспечивает прием, хранение и сборку ракет-носителей и спутников, их испытания, заправку и состыковку. В число задач стартового комплекса входят: доставка носителя с навигационным спутником на стартовую площадку, установка на пусковую систему, предполетные испытания, заправка носителя, наведение и пуск.
Командно-измерительный комплекс служит для снабжения навигационных спутников служебной информацией, необходимой для проведения навигационных сеансов, а также для контроля и управления ими как космическими аппаратами.
Центр управления, связанный информационными и управляющими радиолиниями с космодромом и командно-измерительным комплексом, координирует функционирование всех элементов спутниковой навигационной системы.
Пользовательский сегмент
В пользовательский сегмент входит аппаратура потребителей. Она предназначается для приема сигналов от навигационных спутников, измерения навигационных параметров и обработки измерений. Для решения навигационных задач в аппаратуре потребителя предусматривается специализированный встроенный компьютер. Разнообразие существующей аппаратуры потребителей обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Современная спутниковая навигация основывается на использовании принципа беззапросных дальномерных измерений между навигационными спутниками и потребителем. Это означает, что потребителю передается в составе навигационного сигнала информация о координатах спутников. Одновременно (синхронно) производятся измерения дальностей до навигационных спутников. Способ измерений дальностей основывается на вычислении временных задержек принимаемого сигнала от спутника по сравнению с сигналом, генерируемым аппаратурой потребителя.
На рисунке приведена схема определений местоположения потребителя с координатами x, y, z на основе измерений дальности до четырех навигационных спутников. Цветными яркими линиями показаны окружности, в центре которых расположены спутники. Радиусы окружностей соответствуют истинным дальностям, т.е. истинным расстояниям между спутниками и потребителем. Цветные неяркие линии – это окружности с радиусами, соответствующими измеренным дальностям, которые отличаются от истинных и поэтому называются псевдодальностями. Истинная дальность отличается от псевдодальности на величину, равную произведению скорости света на уход часов b, т.е. величину смещения часов потребителя по отношению к системному времени. На рисунке показан случай, когда уход часов потребителя больше нуля – то есть часы потребителя опережают системное время, поэтому измеренные псевдодальности меньше истинных дальностей.

В идеальном варианте, когда измерения производятся точно и показания часов спутников и потребителя совпадают для определения положения потребителя в пространстве достаточно произвести измерения до трех навигационных спутников.
В действительности показания часов, которые входят в состав навигационной аппаратуры потребителя, отличаются от показаний часов на борту навигационных спутников. Тогда для решения навигационной задачи к неизвестным ранее параметрам (три координаты потребителя) следует добавить еще один — смещение между часами потребителя и системным временем. Отсюда следует, что в общем случае для решения навигационной задачи потребитель должен «видеть», как минимум, четыре навигационных спутника.
Для функционирования навигационных спутниковых систем необходимы данные о параметрах вращения Земли, фундаментальные эфемериды Луны и планет, данные о гравитационном поле Земли, о моделях атмосферы, а также высокоточные данные об используемых системах координат и времени.
Геоцентрические системы координат — системы координат, начало которых совпадает с центром масс Земли. Их также называют общеземными или глобальными.
Для построения и поддержания общеземных систем координат используются четыре основных метода космической геодезии:
- радиоинтерферометрия со сверхдлинной базой (РСДБ),
- лазерная локация космических аппаратов (SLR),
- доплеровские измерительные системы (DORIS),
- навигационные измерения космических аппаратов ГЛОНАСС и других ГНСС.
Международная земная система координат ITRF является эталоном земной системы координат.
В современных навигационных спутниковых системах используются различные, как правило национальные, системы координат.
| Навигационная система | Система координат |
|---|---|
| Система координат ГЛОНАСС | ПЗ-90 (Параметры Земли 1990 года) |
| Система координат GPS | WGS-84 (World Geodetic System) |
| Система координат ГАЛИЛЕО | GTRF (Galileo Terrestrial Referenfce Frame) |
| Система координат БЕЙДОУ | CGCS2000 (China Geodetic Coordinate System 2000) |
| Система координат QZSS | JGS (Japanese geodetic system) |
| Система координат NavIC | WGS-84 (World Geodetic System) |
В соответствии с решаемыми задачами применяются два типа систем времени: астрономические и атомные.
Системы астрономического времени основаны на суточном вращении Земли. Эталоном для построения шкал астрономического времени служат солнечные или звездные сутки, в зависимости от точки небесной сферы, по которой производится измерение времени.
Всемирное время UT (Universal Time) – это среднее солнечное время на гринвическом меридиане.
Всемирное координированное время UTC синхронизировано с атомным временем и является международным стандартом, на котором базируется гражданское время.
Атомное время (TAI) — время, в основу измерения которого положены электромагнитные колебания, излучаемые атомами или молекулами при переходе из одного энергетического состояния в другое. В 1967 году на Генеральной конференции мер и весов атомная секунда представляет собой переход между сверхтонкими уровнями F=4, M=0 и F=3, M=0 основного состояния 2S1/2 атома цезия-133, не возмущённого внешними полями, и что частоте этого перехода приписывается значение 9 192 631 770 Герц.
Спутниковая радионавигационная система является пространственно-временной системой с зоной действия, охватывающей всё околоземное пространство, и функционирует в собственном системном времени. Важное место в ГНСС отводится проблеме временной синхронизации подсистем. Временная синхронизация важна и для обеспечения заданной последовательности излучения сигналов всех навигационных спутников. Она обусловливает возможность применения пассивных дальномерных (псевдодальномерных) методов измерений. Наземный командно-измерительный комплекс обеспечивает синхронизацию шкал времени всех навигационных КА путем их сверки и коррекции (непосредственной и алгоритмической).
Навигационных радиосигналы
При выборе типов и параметров сигналов, используемых в спутниковых радионавигационных системах, учитывается целый комплекс требований и условий. Сигналы должны обеспечивать высокую точность измерения времени прихода (задержки) сигнала и его доплеровской частоты и высокую вероятность правильного декодирования навигационного сообщения. Также сигналы должны иметь низкий уровень взаимной корреляции для того, чтобы сигналы разных навигационных космических аппаратов надежно различались навигационной аппаратурой потребителей. Кроме того, сигналы ГНСС должны максимально эффективно использовать отведенную полосу частот при малом уровне внеполосного излучения, обладать высокой помехоустойчивостью.
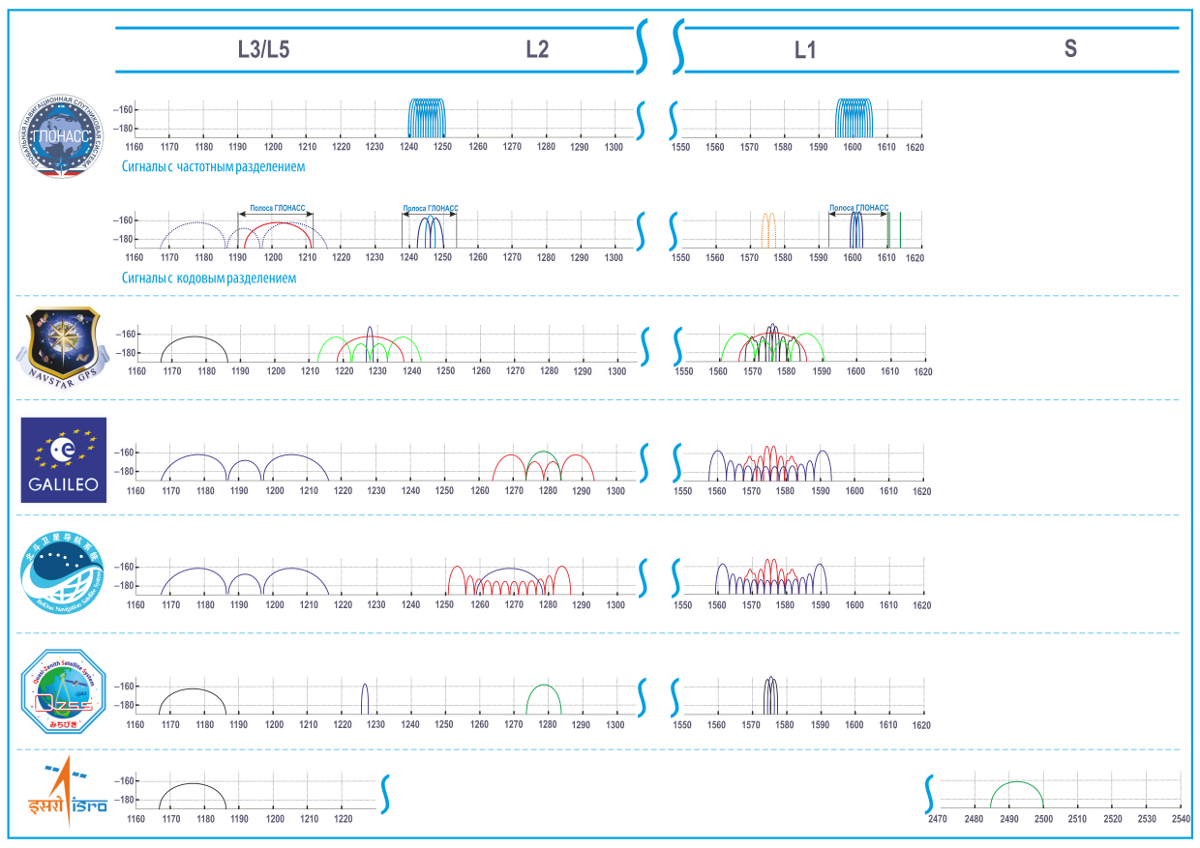
Почти все существующие навигационные спутниковые системы, за исключением индийской системы NAVIC, используют для передачи сигналов диапазон L. Система NAVIC будет излучать сигналы дополнительно и в S диапазоне.
Диапазоны, занимаемые различными навигационными спутниковыми системами
Виды модуляции
По мере развития спутниковых навигационных систем изменялись используемые виды модуляции радиосигналов.
В большинстве навигационных систем изначально использовались исключительно сигналы с бинарной (двухпозиционной)
фазовой модуляцией – ФМ-2 (BPSK). В настоящее время в спутниковой навигации начался переход к новому классу модулирующих функций,
получивших название BOC (Binary Offset Carrier)-сигналов.
Принципиальное отличие BOC-сигналов от сигналов с ФМ-2 состоит в том, что символ модулирующей ПСП BOC-сигнала представляет собой не прямоугольный видеоимпульс, а отрезок меандрового колебания, включающий в себя некоторое постоянное число периодов k. Поэтому сигналы с BOC-модуляцией часто называют меандровыми шумоподобными сигналами.
Использование сигналов с BOC-модуляцией повышает потенциальную точность измерения и разрешающую способность по задержке. Одновременно с этим, уменьшается уровень взаимных помех при совместном функционировании навигационных систем, использующих традиционные и новые сигналы.
Каждый спутник принимает с наземных станций управления навигационную информацию, которая передается обратно пользователям в составе навигационного сообщения. Навигационное сообщение содержит разные типы информации, необходимые для того, чтобы определить местоположение пользователя и синхронизовать его шкалу времени с национальным эталоном.
Типы информации навигационного сообщения
- Эфемеридная информация, необходимая для вычисления координат спутника с достаточной точностью
- Погрешность расхождения бортовой шкалы времени относительно системной шкалы времени для учета смещения времени космического аппарата при навигационных измерениях
- Расхождение между шкалой времени навигационной системы и национальной шкалой времени, для решения задачи синхронизации потребителей
- Признаки пригодности с информацией о состоянии спутника для оперативного исключения спутников с выявленными отказами из навигационного решения
- Альманах с информацией об орбитах и состоянии всех аппаратов в группировке для долгосрочного грубого прогноза движения спутников и планирования измерений
- Параметры модели ионосферы, необходимые одночастотным приемникам для компенсации погрешностей навигационных измерений, связанных с задержкой распространения сигналов в ионосфере
- Параметры вращения Земли для точного пересчета координат потребителя в разных системах координат
Признаки пригодности обновляются в течение нескольких секунд при обнаружении отказа. Параметры эфемерид и времени, как правило, обновляются не чаще, чем раз в полчаса. При этом период обновления для разных систем сильно отличается и может достигать четырех часов, в то время как альманах обновляется не чаще, чем раз в день.
По своему содержанию навигационное сообщение подразделяется на оперативную и неоперативную информацию и передается в виде потока цифровой информации (ЦИ).
Изначально во всех навигационных спутниковых системах использовалась структура вида «суперкадр/кадр/строка/слово». При этой структуре поток ЦИ формируется в виде непрерывно повторяющихся суперкадров,
суперкадр состоит из нескольких кадров, кадр состоит из нескольких строк.
В соответствии со структурой «суперкадр/кадр/строка/слово» формировались сигналы системы БЕЙДОУ, ГАЛИЛЕО (кроме E6), GPS (LNAV данные, L1), сигналы ГЛОНАСС с частотным разделением.
В зависимости от системы, размеры суперкадров, кадров и строк могут отличаться, но принцип формирования остается похожим.
Сейчас в большинстве сигналов используется гибкая строковая структура. В этой структуре навигационное сообщение формируется в виде переменного потока строк различных типов. Каждый тип строки имеет свою уникальную структуру и содержит определённый тип информации (указаны выше). НАП выделяет из потока очередную строку, определяет её тип и в соответствии с типом выделяет информацию, содержащуюся в этой строке.
Гибкая строковая структура навигационного сообщения позволяет значительно более эффективно использовать пропускную способность канала передачи данных.
Но главным достоинством навигационного сообщения с гибкой строковой структурой является возможность её эволюционной
модернизации при соблюдении принципа обратной совместимости. Для этого в ИКД для разработчиков НАП специально указывается,
что если НАП в навигационном сообщении встречает строки неизвестных ей типов, то она должна их игнорировать. Это позволяет добавлять
в процессе модернизации ГНСС к ранее существовавшим типам строк строки с новыми типами. НАП, выпущенная ранее, игнорирует строки с новыми типами и,
следовательно, не использует те новации, которые вводятся в процессе модернизации ГНСС, но при этом её работоспособность не нарушается.
Сообщения сигналов ГЛОНАСС с кодовым разделением имеют строковую структуру.
На точность определения потребителем своих координат, скорости движения и времени влияет множество факторов, которые можно разделить на категории:
- Системные погрешности, вносимые аппаратурой космического комплекса
Погрешности, связанные с функционированием бортовой аппаратуры спутника и наземного комплекса управления ГНСС обусловлены в основном несовершенством частотно-временного и эфемеридного обеспечения.
- Погрешности, возникающие на трассе распространения сигнала от космического аппарата до потребителя
Погрешности обусловлены отличием скорости распространения радиосигналов в атмосфере Земли от скорости их распространения в вакууме, а также зависимостью скорости от физических свойств различных слоёв атмосферы.
- Погрешности, возникающие в аппаратуре потребителя
Аппаратурные погрешности подразделяются на систематическую погрешность аппаратурной задержки радиосигнала в АП и флуктуационные погрешности, обусловленные шумами и динамикой потребителя.
Кроме того, на точность навигационно-временного определения существенно влияет взаимное расположение навигационных спутников и
потребителя.
Количественной характеристикой погрешности определения местоположения и поправки показаний часов, связанной с особенностями пространственного положения спутника и потребителя, служит так
называемый геометрический фактор ΓΣ или коэффициент геометрии. В англоязычной литературе используется обозначение GDOP — Geometrical delusion of precision.
Геометрический фактор ΓΣ показывает, во сколько раз происходит уменьшение точности измерений и зависит от следующих параметров:
- Гп — геометрический фактор точности определения местоположения потребителя ГНСС в пространстве.
Соответствует PDOP — Position delusion of precision. - Гг — геометрический фактор точности определения местоположения потребителя ГНСС по горизонтали.
Соответствует HDOP — Horizontal delusion of precision. - Гв — геометрический фактор точности определения местоположения потребителя ГНСС по вертикали.
Соответствует VDOP — Vertical delusion of precision. - Гт — геометрический фактор точности определения поправки показаний часов потребителя ГНСС.
Соответствует TDOP — Time delusion of precision.
Существующие в настоящее время глобальные навигационные спутниковые системы (ГНСС) GPS и ГЛОНАСС позволяют удовлетворить потребности в навигационном обслуживании обширный круг потребителей. Но существует ряд задач, которые требуют высоких точностей навигации. К этим задачам относятся: взлет, заход на посадку и посадка самолетов, судовождение в прибрежных водах, навигация вертолетов и автомобилей и другие.
Классическим методом повышения точности навигационных определений является использование дифференциального (относительного) режима определений.
Дифференциальный режим предполагает использование одного или более базовых приёмников, размещённых в точках с известными координатами, которые одновременно с приёмником потребителя (подвижным, или мобильным) осуществляют приём сигналов одних и тех же спутников.
Повышение точности навигационных определений достигается за счёт того, что ошибки измерения навигационных параметров потребительского и базовых приёмников являются коррелированными. При формировании разностей измеряемых параметров большая часть таких погрешностей компенсируется.
В основе дифференциального метода лежит знание координат опорной точки – контрольно-корректирующей станции (ККС) или системы опорных станций, относительно которых могут быть вычислены поправки к определению псевдодальностей до навигационных спутников. Если эти поправки учесть в аппаратуре потребителя, то точность расчета, в частности, координат может быть повышена в десятки раз.
Для обеспечения дифференциального режима для большого региона – например, для России, стран Европы, США — передача корректирующих дифференциальных поправок осуществляется при помощи геостационарных спутников. Системы, реализующие такой подход, получили название широкозонные дифференциальные системы.
Подробнее о системах функциональных дополнений ГНСС, которые предоставляют потребителям дополнительную корректирующую информацию, смотрите в разделе «Функциональные дополнения».
Наверхwww.glonass-iac.ru
Спутниковая система навигации — Википедия. Что такое Спутниковая система навигации
 Спутник «Navstar-GPS».
Спутник «Navstar-GPS».Спу́тниковая систе́ма навига́ции (англ. Global Navigation Satellite Systems (GNSS)) — система, предназначенная для определения местоположения (географических координат) наземных, водных и воздушных объектов. Спутниковые системы навигации также позволяют получить скорости и направления движения приёмника сигнала. Кроме того, могут использоваться для получения точного времени. Такие системы состоят из космического оборудования и наземного сегмента (систем управления). В настоящее время только две спутниковые системы обеспечивают полное и бесперебойное покрытие земного шара — GPS и ГЛОНАСС.
Принцип работы
Принцип работы спутниковых систем навигации основан на измерении расстояния от антенны на объекте (координаты которого необходимо получить) до спутников, положение которых известно с большой точностью. Таблица положений всех спутников называется альманахом, которым должен располагать любой спутниковый приёмник до начала измерений. Обычно приёмник сохраняет альманах в памяти со времени последнего выключения и если он не устарел — мгновенно использует его. Каждый спутник передаёт в своём сигнале весь альманах. Таким образом, зная расстояния до нескольких спутников системы, с помощью обычных геометрических построений, на основе альманаха, можно вычислить положение объекта в пространстве.
Метод измерения расстояния от спутника до антенны приёмника основан на том, что скорость распространения радиоволн предполагается известной (на самом деле этот вопрос крайне сложный, на скорость влияет множество слабопредсказуемых факторов, таких как характеристики ионосферного слоя и пр.). Для осуществления возможности измерения времени распространяемого радиосигнала каждый спутник навигационной системы излучает сигналы точного времени, используя точно синхронизированные с системным временем атомные часы. При работе спутникового приёмника его часы синхронизируются с системным временем, и при дальнейшем приёме сигналов вычисляется задержка между временем излучения, содержащимся в самом сигнале, и временем приёма сигнала. Располагая этой информацией, навигационный приёмник вычисляет координаты антенны. Все остальные параметры движения (скорость, курс, пройденное расстояние) вычисляются на основе измерения времени, которое объект затратил на перемещение между двумя или более точками с определёнными координатами.
Основные элементы
Основные элементы спутниковой системы навигации:
- орбитальная группировка спутников, излучающих специальные радиосигналы;
- наземная система управления и контроля (наземный сегмент), включающая блоки измерения текущего положения спутников и передачи на них полученной информации для корректировки информации об орбитах;
- аппаратура потребителя спутниковых навигационных систем («спутниковые навигаторы»), используемая для определения координат;
- опционально: наземная система радиомаяков, позволяющая значительно повысить точность определения координат;
- опционально: информационная радиосистема для передачи пользователям поправок, позволяющих значительно повысить точность определения координат.
Обзор спутниковых систем навигации
Исторические системы
- Transit — первая в мире спутниковая навигационная система, США, 1960-е — 1996
- Циклон — первая спутниковая система навигации в СССР[1]
- Цикада — низкоорбитальная «космическая навигационная система»* (КНС) — гражданский вариант морской спутниковой навигационной системы «Циклон», аналог Transit — 1976 — 1997 гг.
- Парус — низкоорбитальная КНС (именно с таким названием была принята на вооружение в 1976 г.) — серия российских (советских) навигационных спутников военного назначения.
Действующие спутниковые системы
- GPS — принадлежит министерству обороны США. Этот факт, по мнению некоторых государств, является её главным недостатком. Устройства, поддерживающие навигацию по GPS, являются самыми распространёнными в мире. Также известна под более ранним названием NAVSTAR.
- ГЛОНАСС — принадлежит министерству обороны РФ. Разработка системы официально началась в 1976 г., полное развёртывание системы завершилось в 1995 г. После 1996 года спутниковая группировка сокращалась и к 2002 году пришла в упадок. Была восстановлена к концу 2011 г. В настоящее время на орбите находится 27 спутников, из которых 22 используется по назначению[2]. К 2025 году предполагается глубокая модернизация системы.
- DORIS — французская навигационная система. Принцип работы системы связан с применением эффекта Допплера. В отличие от других спутниковых навигационных систем основана на системе стационарных наземных передатчиков, приёмники расположены на спутниках. После определения точного положения спутника система может установить точные координаты и высоту маяка на поверхности Земли. Первоначально предназначалась для наблюдения за океанами и дрейфом материков.
Строящиеся глобальные спутниковые системы
- BeiDou (см. также Compass) — развёртываемая Китаем местная спутниковая система навигации, основанная на геостационарных спутниках. По состоянию на 2015 год система имела 14 работающих спутников: 5 на геостационарных орбитах, 5 — на геосинхронных и 4 — на средних околоземных. Реализация программы началась в 2000 году. Первый спутник вышел на орбиту в 2007 г. В мае 2016 года был запущен 21-й космический аппарат. Предполагается, что к 2020 году, когда количество спутников будет увеличено до 35, система «Бэйдоу» сможет работать как глобальная.
- Galileo — европейская система, находящаяся на этапе создания спутниковой группировки. По состоянию на ноябрь 2016 года на орбите находится 16 спутников, 9 действующих и 7 тестируемых. Планируется полностью развернуть спутниковую группировку к 2020 году[3].
Действующие региональные спутниковые системы
- IRNSS — индийская навигационная спутниковая система, в состоянии разработки. Предполагается для использования только в Индии. Первый спутник был запущен в 2008 году. Общее количество спутников системы IRNSS — 7.
- QZSS — японская квази-зенитная спутниковая система (Quasi-Zenith Satellite System, QZSS) была задумана в 2002 г. как коммерческая система с набором услуг для подвижной связи, вещания и широкого использования для навигации в Японии и соседних районах Юго-Восточной Азии. Первый QZSS-спутник был запущен в 2010 г. Предполагается создание группировки из трёх спутников, находящихся на геосинхронных орбитах, а также собственной системы дифференциальной коррекции.
Применение систем навигации
Кроме навигации, координаты, получаемые благодаря спутниковым системам, используются в следующих отраслях:
- Геодезия: с помощью систем навигации определяются точные координаты точек
- Навигация: с применением систем навигации осуществляется как морская, так и дорожная навигация
- Спутниковый мониторинг транспорта: с помощью систем навигации ведётся мониторинг за положением, скоростью автомобилей, контроль за их движением
- Сотовая связь: первые мобильные телефоны с GPS появились в 90-х годах. В некоторых странах (например, США) это используется для оперативного определения местонахождения человека, звонящего 911. В России в 2010 году начата реализация аналогичного проекта — Эра-ГЛОНАСС.
- Тектоника, тектоника плит: с помощью систем навигации ведутся наблюдения движений и колебаний плит
- Активный отдых: существуют различные игры, где применяются системы навигации, например, Геокэшинг и др.
- Геотегинг: информация, например фотографии «привязываются» к координатам благодаря встроенным или внешним GPS-приёмникам
Основные характеристики систем навигационных спутников
| параметр, способ | СРНС ГЛОНАСС | GPS NAVSTAR | TEN GALILEO | BDS COMPASS |
|---|---|---|---|---|
| Начало разработки | 1976 | 1973 | 2001 | 1983 |
| Первый запуск | 12 Октября 1982 | 22 Февраля 1978 | 28 Декабря 2005 | 30 октября 2000 |
| Число НС (резерв) | 24 (3) | 24 (3) | 27 (3) | 30 (5) |
| Число орбитальных плоскостей | 3 | 6 | 3 | 3 |
| Число НС в орбитальной плоскости (резерв) | 8 (1) | 4 | 9 (1) | 9 |
| Тип орбит | Круговая (e=0±0.01) | Круговая | Круговая | Круговая |
| Высота орбиты (расчетная), км | 19100 | 20183 | 23224 | 21528 |
| Наклонение орбиты, градусы | 64.8±0.3 | ~55 (63) | 56 | ~55 |
| Номинальный период обращения по среднему солнечному времени | 11 ч 15 мин 44 ± 5 с | ~11 ч 58 мин | 14 ч 4 мин. и 42 с. | 12 ч 53 мин 24 |
| Характеристики сигнала | FDMA (CDMA планируется) | CDMA | CDMA | CDMA |
| Способ разделения сигналов НС | Кодово-частотный (кодовый на испытаниях) | Кодовый | Кодово-частотный | нет данных |
| число частот | 24 + 12 планируется | 2 + 1 планируется | 5 | 2 + 1 планируется |
| Несущие частоты радиосигналов, МГц | L1=1602.5625…1615.5 L2=1246.4375…1256.5 L3= 1207,2420…1201,7430 | L1=1575.42 L2=1227.60 L5=1176.45 | E1=1575.42 (L1) E6=1278.750 E5=L5+L3 E5=1191.795 E5A=1176.46 (L5) E5B=1207.14 E6=12787.75 | B1=1575,42 (L1) B2=1191,79 (E5) B3=1268,52 |
| Период повторения дальномерного кода (или его сегмента) | 1 мс | 1 мс (С/А-код) | нет данных | нет данных |
| Тип дальномерного кода | М-последовательность (СТ-код 511 зн.) | Код Голда (С/А-код 1023 зн.) | М-последовательность | нет данных |
| Тактовая частота дальномерного кода, МГц | 0.511 | 1.023 (С/А-код) 10.23 (P,Y-код) | Е1=1.023 E5=10.23 E6=5.115 | нет данных |
| Скорость передачи цифровой информации(соответственно СИ- и D- код) | 50 зн/с (50Гц) | 50 зн/с (50Гц) | 25, 50, 125, 500, 100 Гц | 50/100 25/50 500 |
| Длительность суперкадра, мин | 2.5 | 12.5 | 5 | нет данных |
| Число кадров в суперкадре | 5 | 25 | нет данных | нет данных |
| Число строк в кадре | 15 | 5 | нет данных | нет данных |
| Система отсчета времени | UTC (SU) | UTC (USNO) | UTC (GST) | UTC (BDT) |
| Система отсчета координат | ПЗ-90/ПЗ90.2 | WGS-84 | ETRF-00 | CGCS -2000 |
| Тип эфемирид | Геоцентрические координаты и их производные | Модифицированные кеплеровы элементы | Модифицированные кеплеровы элементы | нет данных |
| Сектор излучения от направления на центр земли | ±19 в 0 | L1=±21 в 0 L2=±23.5 в 0 | нет данных | нет данных |
| Сектор Земли | ±14.1 в 0 | ±13.5 в 0 | нет данных | нет данных |
| Система дифференциальной коррекции | СДКМ | WAAS | EGNOS | SNAS |
| Высокоорбитальные Геосинхронный Сегмент | ведутся НИР | нет | ведутся НИР | 3 НС |
| Геостационарный сегмен | ведутся НИР | нет | ведутся НИР | 5 НС |
Дифференциальное измерение
Отдельные модели спутниковых приёмников позволяют производить т. н. «дифференциальное измерение» расстояний между двумя точками с большой точностью (сантиметры). Для этого измеряется положение навигатора в двух точках с небольшим промежутком времени. При этом, хотя каждое такое измерение имеет погрешность, равную 10-15 метров без наземной системы корректировки и 10-50 см с такой системой, измеренное расстояние имеет погрешность намного меньшую, так как факторы, мешающие измерению (погрешность орбит спутников, неоднородность атмосферы в данном месте Земли и т. д.) в этом случае взаимно вычитаются.
Кроме того, есть несколько систем, которые посылают потребителю уточняющую информацию («дифференциальную поправку к координатам»), позволяющую повысить точность измерения координат приёмника до 10 сантиметров. Дифференциальная поправка пересылается либо с геостационарных спутников, либо с наземных базовых станций, может быть платной (расшифровка сигнала возможна только одним определённым приёмником после оплаты «подписки на услугу») или бесплатной.
На 2009 год имелись следующие бесплатные системы предоставления поправок: американская система WAAS (GPS), европейская система EGNOS (Galileo), японская система MSAS (QZSS)[4]. Они основаны на нескольких передающих поправки геостационарных спутниках, позволяющих получить высокую точность (до 30 см).
Создание системы коррекции для ГЛОНАСС под названием СДКМ завершено к 2016.
Примечания
Литература
Ссылки
wiki.sc